Just a quick recap what has been learned in the memory of the AVI@TOR 02 airframe.
Quit while you're ahead. Having the wing broke and fall of mid flight due to material fatigue is only amusing for so long. Once you know what kind of stress the airframe is going to be subjected to, reinforce it.
Also, physics works. Using ailerons as flaps changes the behavior of the plane. Don't forget to use the elevator to compensate for the shift in plane's Center of gravity.
That and the field test are fun! Hope for many more.
Thursday, July 15, 2010
Tuesday, July 13, 2010
And so it Flies
A complete success. The plane flew on it's own and spectacularly crashed on it's own.

First the good news, two successful autonomous "straight" flights (without plotted course):




First flight lasted about 5 seconds, before it got knocked from the path by wind and it had to be landed down manually.




Second flight lasted about 8 seconds, before it got knocked from the path again by wind. Only this time the plane managed to stabilize itself, causing it to loose altitude, managed again to correct itself and fly upwards, but the maneuver was too steep and the worn out airframe failed and crashed.
For some reason the GPS resolution was poor on the second flight.
Now the bad news, the crash destroyed the airframe and broke the demodulator board. No more flying until the plane is rebuild and electronics are replaced.




As for the crash, the "official report" is this:
The plane flew stable, maintaining heading and altitude until it got hit off the path by wind. Even with stabilization it veered right both times, probably on the account of a worn out, slower and imprecise servo (it has seen a lot of crashes). The second time it managed to stabilize itself which resulted in the nose of the plane pointing downwards and loosing altitude. When attempting to achieve neutral pitch from previous maneuver it turned upwards too sharply, resulting in increased stress on the airframe, which due to materials being worn out (again, it has seen a lot of crashes), the wings bent out of shape, pulling out the link between the servo ans one of the ailerons, causing it to destabilize and crash in a spiral.

First the good news, two successful autonomous "straight" flights (without plotted course):




First flight lasted about 5 seconds, before it got knocked from the path by wind and it had to be landed down manually.




Second flight lasted about 8 seconds, before it got knocked from the path again by wind. Only this time the plane managed to stabilize itself, causing it to loose altitude, managed again to correct itself and fly upwards, but the maneuver was too steep and the worn out airframe failed and crashed.
For some reason the GPS resolution was poor on the second flight.
Now the bad news, the crash destroyed the airframe and broke the demodulator board. No more flying until the plane is rebuild and electronics are replaced.




As for the crash, the "official report" is this:
The plane flew stable, maintaining heading and altitude until it got hit off the path by wind. Even with stabilization it veered right both times, probably on the account of a worn out, slower and imprecise servo (it has seen a lot of crashes). The second time it managed to stabilize itself which resulted in the nose of the plane pointing downwards and loosing altitude. When attempting to achieve neutral pitch from previous maneuver it turned upwards too sharply, resulting in increased stress on the airframe, which due to materials being worn out (again, it has seen a lot of crashes), the wings bent out of shape, pulling out the link between the servo ans one of the ailerons, causing it to destabilize and crash in a spiral.
Tuesday, July 06, 2010
Hardware vs. Software
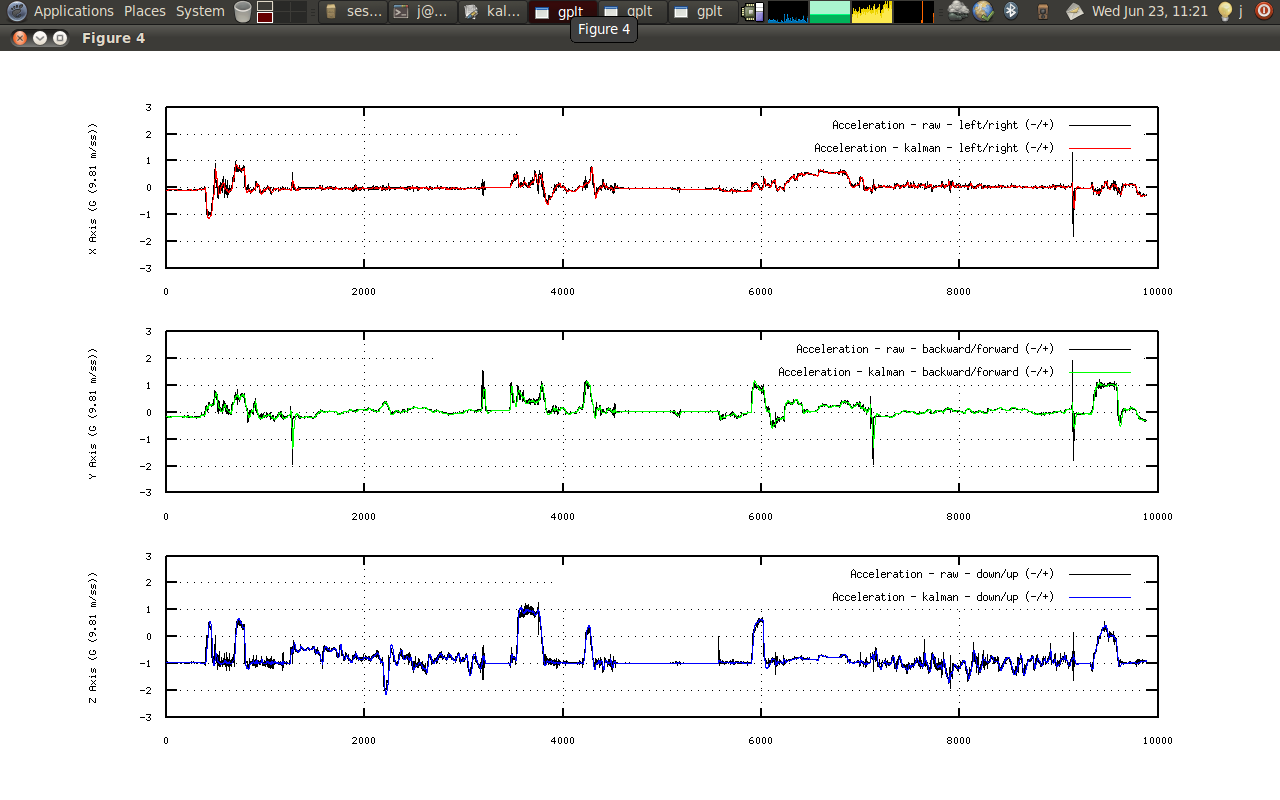
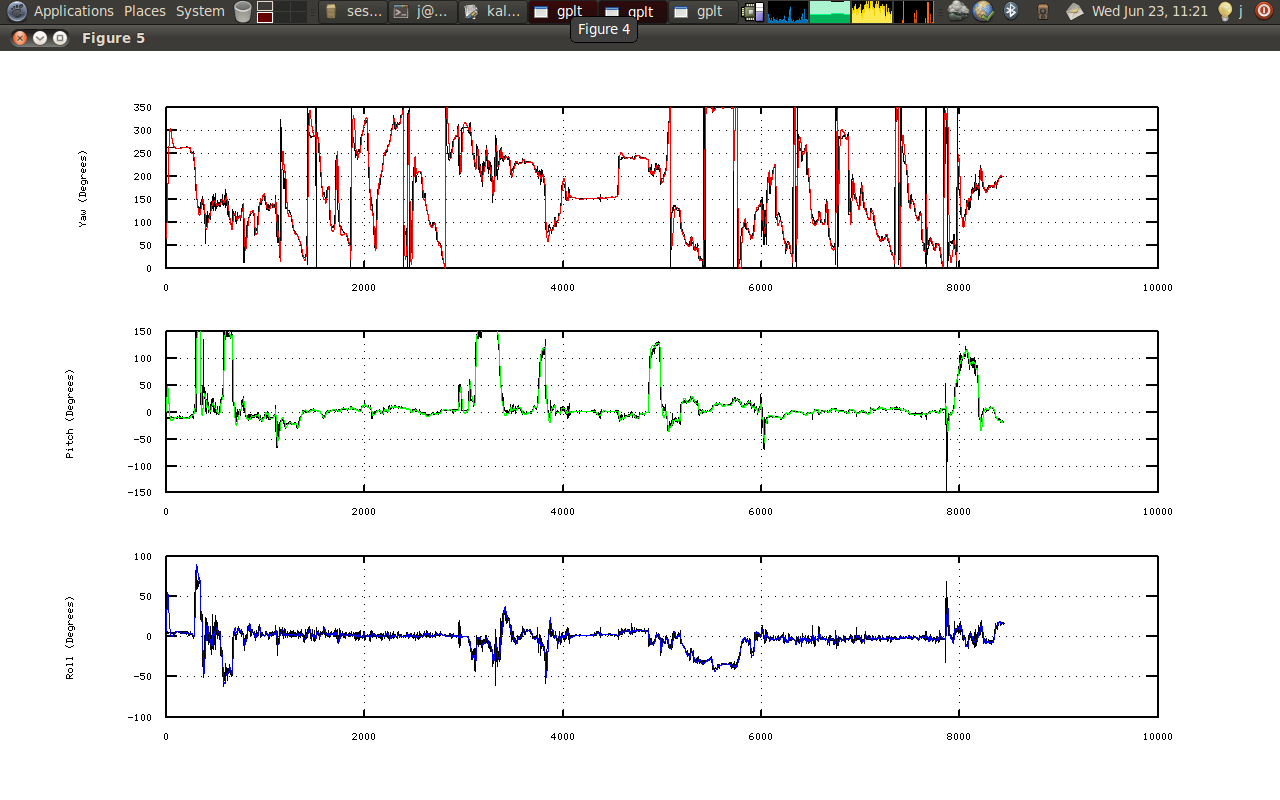
With the new phone there was a significant reduction in the noise the sensors picked up.
Was it the upgraded hardware (from G1 to Legend) or software (from Android 1.6 to 2.1):
And now that the old phone was promoted from "crash testing" to experimenting with the latest and greatest of home brew rom's, an experiment is in order:






The conclusion we can get from this is that the newer version of Android doesn't have any added noise reduction filters and that it is indeed the hardware that is better in the newer HTC Legend.
Was it the upgraded hardware (from G1 to Legend) or software (from Android 1.6 to 2.1):
And now that the old phone was promoted from "crash testing" to experimenting with the latest and greatest of home brew rom's, an experiment is in order:


HTC G1, flying Android 1.6


HTC G1, flying Android 2.1
HTC Legend, flying Android 2.1
The conclusion we can get from this is that the newer version of Android doesn't have any added noise reduction filters and that it is indeed the hardware that is better in the newer HTC Legend.
Monday, July 05, 2010
Localizing FlightGear
Until now, FlightGear has been used to test bits and pieces with the default settings, which means starting just outside San Francisco, USA.


But from now on, has been configured to make the place a bit more familiar.


But from now on, has been configured to make the place a bit more familiar.
Subscribe to:
Comments (Atom)